一个基础的工业机器人工作站由机器人本体和作业对象组成。接下来,我们将通过实例学习如何布置机器人周边的设备模型。
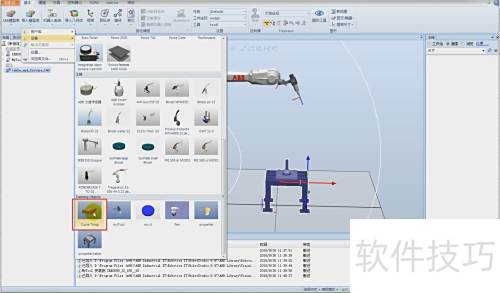
1、 在基本功能中,从导入模型库的下拉菜单选择设备
2、 从列表中选取propeller table模型并导入。
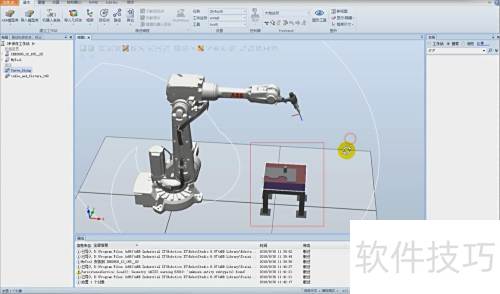
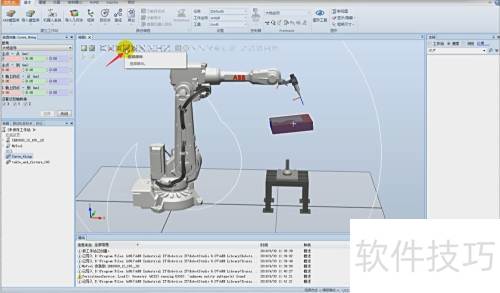
3、 在布局界面中选中机器人,右键点击并选择显示其工作区域。
4、 白色区域表示机器人可活动范围。

5、 应将工作对象置于机器人最佳作业区间内。
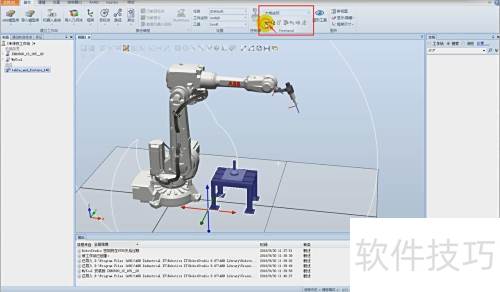
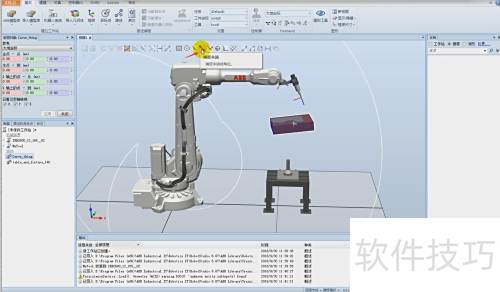
6、 调整位置有助于提升节拍并优化轨迹规划,现将小桌移入机器人作业范围。
7、 使用Freehand工具栏可实现对象的移动操作。
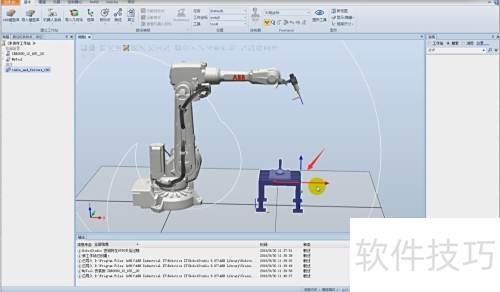
8、 在Freehand工具栏中选择大地坐标,然后点击移动按钮。
9、 拖动箭头至目标位置即可。
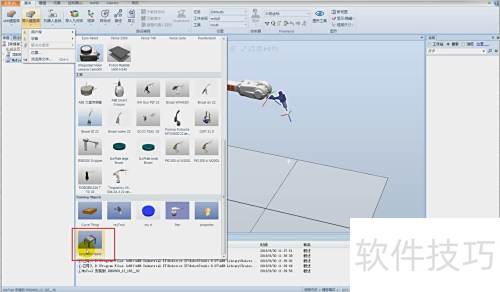
10、 在基本功能里点击导入模型库选项。
11、 从设备下拉列表中选择Curve Thing以导入模型。
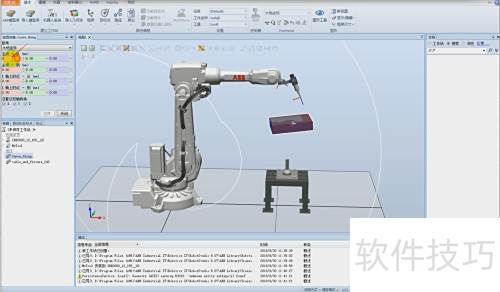
12、 把曲线物体放到小桌子上。
13、 右键点击对象,选择位置,再点击放置中的两点选项。

14、 准确捕捉对象特征需选用合适的捕捉工具。
15、 将鼠标悬停在捕捉工具上即可查看详细说明。
16、 启用捕捉工具中的选择部件与捕捉末端功能。
17、 点击主点从的第一个坐标输入框。
18、 依次点击两个物体的对齐基准线。
19、 第一点和第二点保持对齐。
20、 第三点与第四点保持对齐。

21、 目标位置坐标已自动填入框内,请点击应用确认。

22、 物品已精准摆放在小桌面上。